
本质上讲,协作机器人与传统机器人之间并没有非常大的不同,只是基于不同市场定位的工业机器人产品。
或者说二者替代的对象不一样。传统机器人生产线,机器人做为整个生产线中的组成部分,很难单独拿出来,如果某个环节的机器人坏了,在没有设计备份的情况下,整个产线可能要停工。而协作机器人的独立性很强,它代替的是人,二者之间可以互换,一个协作机器人坏了,挪开找个人代替就好了,整个生产流程的灵活性非常高。

a). 安全性
机器人和人交互,必须要保证的是人类安全,碰撞检测是协作机器人务必要实现的功能,是人机协作的前提。国际标准化组织在2016年发布了ISO/TS 15066标准,对协作机器人安全性分为安全级监测、手动示教、功率和力限制、速度和分离监控四个方面。
传统工业机器人的工作场景往往是在保护围栏或其它保护措施后,而协作机器人能够直接和操作人员在同一条生产线上工作,却不需要使用安全围栏与人隔离,为全手动和全自动的生产模式之间搭建了桥梁。
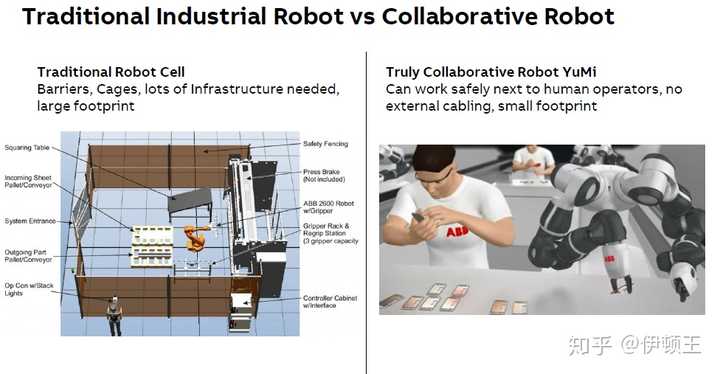
传统机器人也有碰撞检测功能,但是传统机器人碰撞检测的目的一般是为了减少碰撞力对机器人本体的影响,避免机器人本体或者外围设损坏。
协作机器人碰撞检测的功能是为了解决人和机器人共融的问题。其实现的方式,有借助力感知皮肤,关节力矩传感器,电流估算力反馈模型等方式。在实现的方式上,务必需要体现碰撞力的设置,以满足不同环境下力的灵活设置。
b). 易于上手
易用性最为直接是拖动示教。还有很多企业通过对机器人编程语言优化,推出图形化编程界面实现。
拖动示教的原理是借助机器人的动力学模型,控制器实时的算出机器人被拖动时所需要的力矩,然后把提供该力矩给电机使得机器人能够很好地辅助操作人员进行拖动。其计算公式包括惯性力项、科里奥利力和离心力项、重力项以及摩擦力项。
而当中根据选择的摩擦力模型可以分解为粘性摩擦力项、库仑摩擦力项以及补偿。摩擦力的计算是相对复杂的数学模型。基于目前技术的实现方式,有无传感补偿技术;加外置力传感器反馈优化模型计算;弹性装置伸缩模型计算等。这一步每家机器人公司均有独特优势,可以达到无重力拖动示教功能。
c). 低成本
d). 灵活
协作机器人本体重量必轻,能够适应不同场景的搬动和简单安装,产品安装及移动部署相对灵活。
来源:知乎 作者:伊顿王

欢迎留下咨询内容,我们将尽快给您回复



